Artikli meditsiiniline ekspert

Uued väljaanded
Segasus ja diploomia
Viimati vaadatud: 04.07.2025

Kõik iLive'i sisu vaadatakse meditsiiniliselt läbi või seda kontrollitakse, et tagada võimalikult suur faktiline täpsus.
Meil on ranged allhanke juhised ja link ainult mainekate meediakanalite, akadeemiliste teadusasutuste ja võimaluse korral meditsiiniliselt vastastikuste eksperthinnangutega. Pange tähele, et sulgudes ([1], [2] jne) olevad numbrid on nende uuringute linkideks.
Kui tunnete, et mõni meie sisu on ebatäpne, aegunud või muul viisil küsitav, valige see ja vajutage Ctrl + Enter.
Binokulaarne nägemine nõuab mõlema silma samaaegset bifoveaalset fikseerimist, st kumbki silm tajub fikseerimisobjekti eraldi ja osaleb pildi kujundamises. Binokulaarse nägemise tingimused on järgmised:
- Kattuvad vaateväljad.
- Õige neuromuskulaarne areng ja koordinatsioon visuaalsete telgede suunaga objekti suhtes.
- Normaalsed nägemisrajad.
- Mõlemas silmas on pildi selgus ja suurus ligikaudu sama.
- Võrkkesta vastavad punktid, "tsüklopeenne" silm.
- Segadus on kahe üksteise peale asetatud, kuid erineva kujutise samaaegne tajumine, mis on põhjustatud vastavate punktide (tavaliselt fovea) stimuleerimisest erinevate objektide poolt.
- Diploopia on ühe objekti kahe kujutise samaaegne tajumine. See tekib siis, kui ühe objekti visuaalsed kujutised projitseeritakse võrkkesta mittevastavatele punktidele. Samaaegne nägemine on võime tajuda objekti samaaegselt mõlema silmaga.
- Visuaalne suund on võrkkesta antud elemendi projektsioon subjektiivse ruumi erisuunas.
- peamine visuaalne suund - suund välisruumis, mida tõlgendatakse vaateväljana. Tavaliselt on see fovea visuaalne telg;
- sekundaarsed nägemissuunad - ekstrafoveaalsete punktide projektsioonisuunad fovea primaarse suuna suhtes.
- Projektsioon on objekti asukoha tõlgendamine ruumis võrkkesta stimuleeritud elementide põhjal.
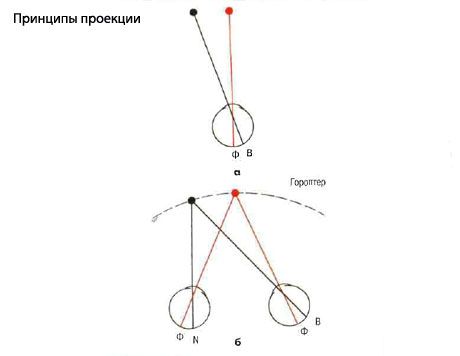
Kui punane objekt stimuleerib paremat foveolat ja ninapoolses nägemisväljas asuv must objekt stimuleerib võrkkesta oimuspoole elemente, siis tõlgendab aju punast objekti otse projitseerituna sirge peaga ja musta objekti tõlgendatakse nägemisvälja ninapoolses pooles tekkivana. Samamoodi projitseeritakse võrkkesta nasaalsed elemendid nägemisvälja oimuspoolele, ülemised elemendid alumisele poolele ja vastupidi.
- Mõlema silma avatud olekus stimuleerib punane objekt mõlemat foveae'd ehk vastavaid võrkkesta punkte. Must objekt stimuleerib lisaks parema silma oimusabadele ka vasaku silma nasaalselt paiknevaid võrkkesta elemente. Seega projitseeritakse objektid parema silma nägemisvälja nasaalsesse poolde ja vasaku silma nägemisvälja oimusabasse. Enamik neist võrkkesta elementidest on aga vastavad punktid, seega projitseeritakse objekt ruumis samasse asendisse (vasakul).
- Retinomotoorsed väärtused. Perifeerses nägemisväljas oleva objekti kujutis langeb ekstrafoveaalsele elemendile. Objekti fikseerimiseks on vaja teatud amplituudiga sakaadi. Seega on igal võrkkesta ekstrafoveaalsel elemendil retinomotoorne väärtus, mis on proportsionaalne kaugusega foveast, mis määrab objekti täpseks fokuseerimiseks vajaliku sakaadi amplituudi. Retinomotoorne väärtus foveola keskel vastab nullile ja suureneb perifeeria suunas.
- Vastavad punktid on võrkkesta piirkonnad, millel on sama subjektiivne nägemissuund (nt otseprojektsioon foveasse). Ühe silma ninapoolsel võrkkesta punktid vastavad teise silma võrkkesta oimuspoole vastavatele punktidele. See on normaalse võrkkesta vastavuse alus. Näiteks objekt, mille kujutised projitseeritakse parema silma võrkkesta ninapoolsele poolele ja vasaku silma võrkkesta oimuspoolele, projitseeritakse nägemisruumi paremale poolele.
- Horopter on kujuteldav tasapind välisruumis, mille kõik punktid stimuleerivad ainult vastavaid võrkkesta elemente ja mida seetõttu tajuvad mõlemad silmad ühe punktina. See tasapind läbib nägemistelgede lõikepunkti ja hõlmab seega binokulaarse nägemise fikseerimispunkti.
- Binokulaarse nägemise Panumi fusioonitsoon on horopteri ees ja taga asuv tsoon, mille sees objekti nähakse üksikuna, kuigi vastavate elementide täpne stimuleerimine puudub. Panumi tsoonist väljaspool asuvaid objekte tajutakse kahekordselt. See on füsioloogilise diploopia alus. Panumi tsoon on fikseerimistsoonis kitsas (6 kaaresekundit) ja laieneb perifeeria poole, seega horopteri sees olevaid objekte nähakse üksikutena. Panumi fusioonitsoonis olevaid objekte tajutakse üksikute ja stereoskoopilistena. Panumi fusioonitsoonist väljaspool asuvaid objekte tajutakse kahekordselt.
- Sensoorne fusioon on kahe sensoorse kujutise ühendamine mõlemast silmast nägemiskoortes üheks visuaalseks kujutiseks. Tsentraalne sensoorne fusioon ühendab foveasse projitseeritud kujutised ja perifeerne sensoorne fusioon ühendab foveast kaugemale projitseeritud kujutised.
- Motoorne fusioon on silmade õige asendi säilitamise funktsioon bifokaalse fikseerimise saavutamiseks. Motoorse fusiooni stiimuliks on võrkkesta kujutise lihtsus, mis stimuleerib fusioonivergentsi.
- Fusioonivergents hõlmab silmaliigutuste disjugeerimist, et ületada võrkkesta kujutise ebavõrdsus. Fusioonireservi saab mõõta prismade või sünoptofoori abil. Normaalsed reservi väärtused on:
- Kovergentsus: umbes 15 D (kauge objekti fikseerimine) ja 25 D (lähedale jääva objekti fikseerimine).
- Divergents: umbes 25 D (kauge objekti fikseerimine) ja 12 D (läheda objekti fikseerimine).
- Vertikaalne: 2-3 D.
- Tsüklovergents: umbes 2.
Fusiooniline konvergents kontrollib eksofooriat, samas kui fusioonne divergents aitab kontrollida esofooriat. Fusioonilisi vergentsimehhanisme võivad nõrgestada väsimus või haigus, muutes fooria troopiaks. Fusiooniliste vergentsimehhanismide laiust saab suurendada ortopeediliste harjutustega, näiteks fusioonse konvergentsi abil lähedal asuva objekti fikseerimisel, kui konvergents on nõrk.
- Stereopsis on sügavuse tajumine (kolmas dimensioon, millest kaks esimest on kõrgus ja laius). See tekib siis, kui horisontaalselt erinevaid punkte stimuleerivad samaaegselt objektid, mis asuvad fikseerimispunktist eespool ja taga, kuid Panumi fusioonitsoonis. Selliste erinevate kujutiste liitmine annab tulemuseks ühe sügavusega kujutise tajumise. Objekti tajutakse stereoskoopiliselt (3D), kuna iga silm näeb objekti erinevaid aspekte.
 [
[