
Segadus ja diploopia
Viimati vaadatud: 23.04.2024

Kõik iLive'i sisu vaadatakse meditsiiniliselt läbi või seda kontrollitakse, et tagada võimalikult suur faktiline täpsus.
Meil on ranged allhanke juhised ja link ainult mainekate meediakanalite, akadeemiliste teadusasutuste ja võimaluse korral meditsiiniliselt vastastikuste eksperthinnangutega. Pange tähele, et sulgudes ([1], [2] jne) olevad numbrid on nende uuringute linkideks.
Kui tunnete, et mõni meie sisu on ebatäpne, aegunud või muul viisil küsitav, valige see ja vajutage Ctrl + Enter.
Binokulaarse nägemise jaoks on vajalik mõlema silmaga samaaegne bifovelli fikseerimine, st Iga silm tajub eraldi fikseerimise objekti, osaledes pildi kujunemisel. Binokulaarse nägemise jaoks vajalikud seisundid:
- Vaadete väljad ülekattega.
- Nõuetekohane neuromuskulaarne areng ja koordineerimine objekti visuaalsete telgede suunas.
- Tavalised visuaalsed rajad.
- Ligikaudu sama piltide selgus ja suurus mõlemas silmas.
- Vastavad võrkkesta punktid, "tsüklopeediline" silm.
- Segadus - samaaegne kaht peidetud, kuid erineva kujutise taju, mida põhjustavad erinevate objektide (tavaliselt taustal) vastavate punktide stimuleerimine.
- Diplomaatia on ühe objekti kahe pildi üheaegne tajumine. Tekib, kui ühe objekti visuaalsed kujutised projitseeritakse mitte-lõikuvate võrkkesta punktide külge. Samaaegne nägemine on võime tajuda objekti mõlema silmaga samal ajal.
- Visuaalne suund on võrkkesta antud elemendi projektsioon subjektiivse ruumi erilises suunas.
- peamine visuaalne suund on väliskeskkonna suund, mida tõlgendatakse silmapiiri järgi. See on tavaliselt fovea visuaalne telg;
- sekundaarsed visuaalsed suundumused - prognoositud välisfoveali punktide suunas võrreldes fovea põhisuunaga.
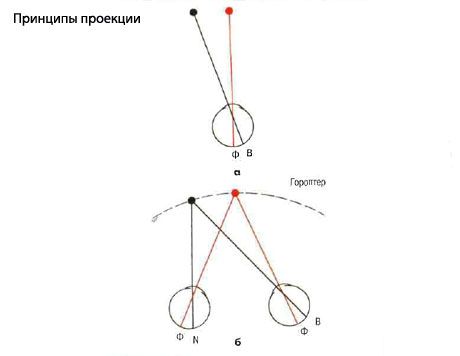
- Projitseerimine on objekti positsiooni tõlgendamine ruumis stimuleeritud võrkkesta elementide alusel.
- Kui punane objekti stimuleerib õigus foveola ja must objekt, mis asub nina poole valdkonnas, ergutades elemendid ajalise poole võrkkesta, punane objekti tõlgendab aju nagu õige ekraan kui püstises asendis pea ja must - nii tekkis ja nina poole vaatevälja. Sarnaselt on võrkkesta nasaalsed elemendid projitseeritud vaate ajalisele poolele. ülemine - alumisel poolel ja vastupidi.
- Kahe avatud silmaga stimuleerib punane objekt nii fovea kui ka vastavaid võrkkesta punkte. Must objekt stimuleerib mitte ainult õige silma võrkkesta ajalisi elemente, vaid ka vasaku silma võrkkesta elemente, mis paiknevad nasaalselt. Seega kujundatakse objektid parempoolse silma nägemispiirkonna nasaalse poolega ja vasakpoolse silma vaatevälja ajalise poolega. Kuid enamik neist võrkkesta elementidest on vastavad punktid, nii et objekt projitseeritakse ruumi samale positsioonile (vasakul).
- Retino-motoorse väärtused. Objekti kujutis perifeerses vaateväljas satub ekstra-foveali elemendile. Objekti fikseerimise kindlakstegemiseks on vaja teatud amplituudiga saksakeedi. Seega on igal võrkkesta ekstra-foveaalsel elemendil retino-mootoriväärtus, mis on proportsionaalne kaugusele fovea-st, mis määrab objekti täpse fokuseerimise jaoks vajaliku saccade'i amplituudi. Reetino-mootori väärtus foveola keskel vastab nullile ja tõuseb äärepikkuse suunas.
- Vastavad punktid on võrkkesta alad, millel on sama subjektiivne visuaalne suund (näiteks otsene projektsioon foveas). Ühe silma nina-võrkkesta punktid vastavad teise silma võrkkesta ajalise pooli vastavatele punktidele. See on võrkkesta normaalse vastavuse alus. Näiteks objekt, mille pilte projitseeritakse parempoolse silma võrkkesta nina poolele ja vasakpoolse silma võrkkesta ajaline pool, projitseeritakse visuaalse ruumi parempoolsele poolele.
- Goropter on väliskeskkonnas kujuteldav tasapind, mille kõiki elemente stimuleerivad ainult võrkkesta vastavad elemendid ja mida seetõttu mõlemad silmad tajuvad ühe punktiga. See tasapind läbib visuaalsete telgede ristumiskohta ja hõlmab seega fikseerimispunkti binokulaarse nägemisega.
- Fusioonivöönd Binokulaarse nägemise ranum on gopheri ees ja taga paiknev ala, mille sees objekt on üksinda vaadeldav, kuigi vastavaid elemente pole täpselt stimuleeritud. Objektid väljaspool Panumi tsooni peetakse kahekordseks. See on füsioloogilise diploopia aluseks. Panum tsoon on kitsas fikseerimistsoonis (6 kaar sekundit) ja laieneb perifeeriasse, nii et veski esemeid peetakse üheks. Panumi fusioontsooni objektid on tajutud üksikult ja stereoskoopiliselt. Objektid väljaspool Panumi fusioontsooni peetakse kahekordseks.
- Sensorne fusioon on kahekordne kahe maastiku kujutis igast silmast visuaalses koore ühes visuaalses kujutises. Keskne sensoorne fusion ühendab kujutised, mis on projekteeritud fovea, ja perifeerne - väljaspool fovea.
- Mootori fusioon on funktsioon, et säilitada silmade õige asend, et saavutada bifofiline fikseerimine. Mooduli fusioonide stiimuliks on võrkkesta kuju, mis stimuleerib fusioonivergeniat, võrkkesta.
- Fusioonivergenia hõlmab silmade liigutusi, et ületada võrkkesta kujutise erinevused. Fusioonivarusid saab mõõta prismate või sünoptofooridega. Normaalsed reservväärtused:
- Lähenemine: umbes 15 D (kauge objekti fikseerimine) ja 25 D (lähedal asuva objekti fikseerimine).
- Erinevus: umbes 25 D (kaugema objekti fikseerimine) ja 12 D (lähima objekti fikseerimine).
- Vertikaalne: 2-3 d
- Cyclostergence: umbes 2.
Läbi fusioonilise lähenemise kontrollitakse eksofooriat ja fusioonivõrrand aitab kontrollida esooriast. Vergentsi fuzzy mehhanisme saab nõrgestada väsimuse või haiguse poolt, muutes raevu troopiliseks. Fusioonsete tippude mehhanismide laiust saab ortopeediliste harjutuste abil suurendada, näiteks fusiooniline lähenemine, kui fikseeritakse lähedal asuv objekt nõrga lähenemisega.
- Stereopsis - sügavuse tajumine (kolmas mõõde, esimesed kaks - kõrgus ja laius). Tekib horisontaalselt erinevatest punktidest üheaegselt stimuleerimine objektidega eelnevalt ja tagantpoolt fikseerimispunktist, kuid Panumi fusioontsooni piires. Selliste erisuguste piltide ühendamine toob kaasa ühe pildi põhjalikku tajumist. Objekt on tajutav stereoskoopiliselt (3D), sest iga silma näeb objekti erinevaid aspekte.
 [
[